
















MC-514 KINEMATICS & RIGID BODY DYNAMICS
Credit Hours = 3
COURSE CONTENT
- The Components of Mechanism: Review of Classical Mechanics, Joints, Pairs and Couplings, Mobility, Grashof’s Law.
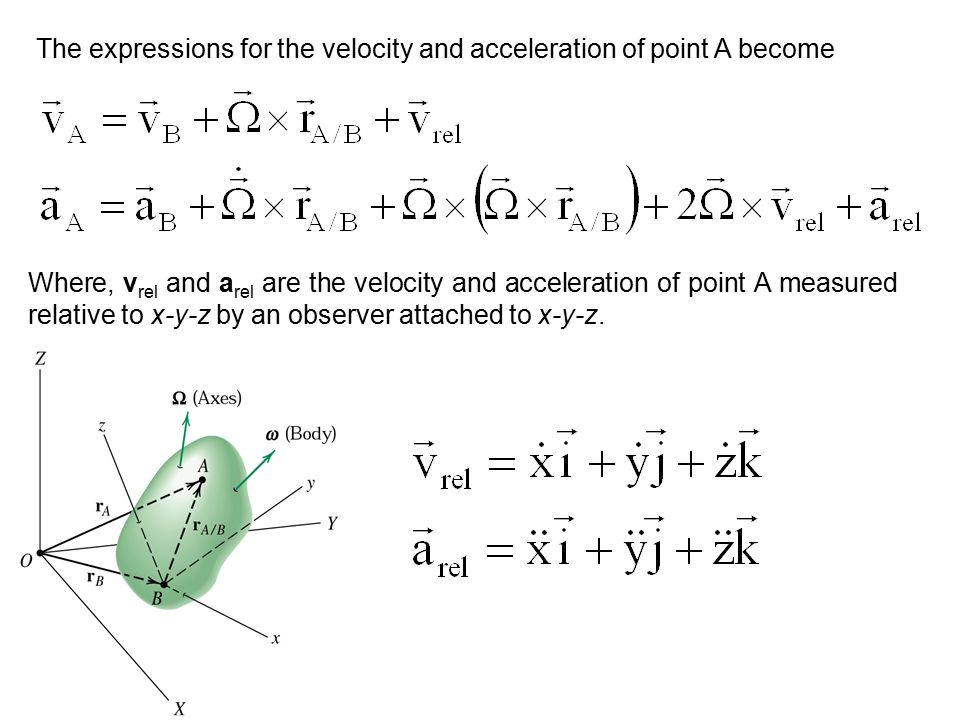
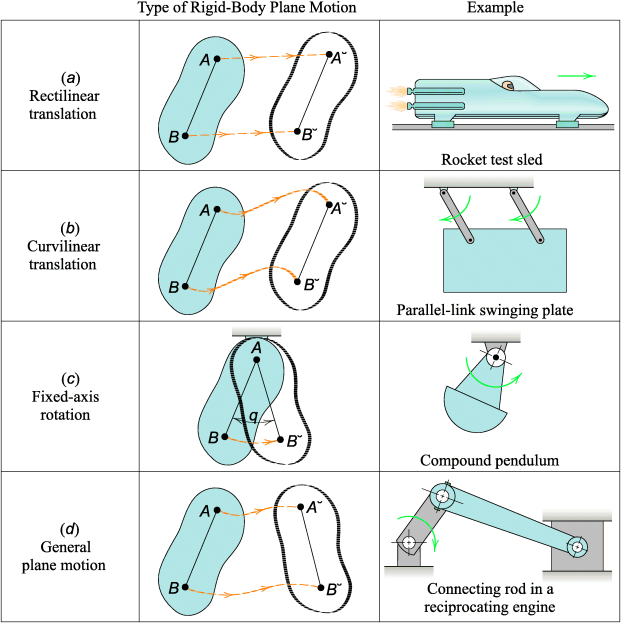
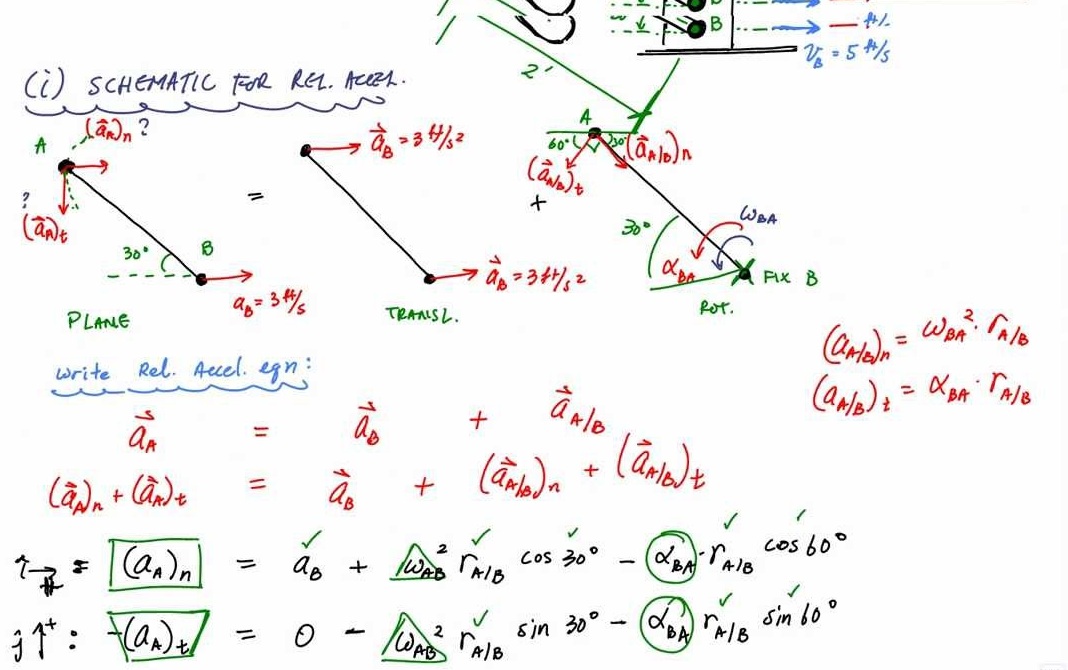
- Planar Kinematics Analysis and Modelling: Analytical Methods for Kinematic Analysis, Kinematic Analysis of Pin Connected, Slider-Crank and Direct Contact Mechanisms, Graphical Methods, Velocity and Acceleration Analysis by Vector Mathematics.
- Linkage Design: Four Bar Mechanism and Crank-Rocker Mechanism, Drag-Link Mechanism; Designing for Prescribed Velocity or Torque, Function Generators.
- Dynamics of Planar Systems: Static Force Analysis, Planar Dynamic Force Analysis, Methods of Linkage Force Analysis, Force Calculations for Gears and Cams, Gyroscopic Forces, Dynamic Modelling and Analysis Techniques Using ADAMS.
- Spatial Mechanisms: Mobility, Describing Spatial Motions, Kinematic Analysis of Spatial Mechanisms; Manipulator Kinematics: Homogeneous Transformations, Review of Robot Kinematics; Trajectory Planning: Joint Space Trajectories Point to Point and Continuous Path Motion Cartesian Space Schemes.
- Manipulator Dynamics and Control: Lagrange and Newton-Euler Formulation for Manipulator Dynamics, Robot Control, Proportional Integral Derivative (PID) Control, Feed-forward Control.
RECOMMENDED BOOKS
Coming Soon
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}