
















ME-508 KINEMATICS & RIGID BODY DYNAMICS
Credit Hours = 3
COURSE CONTENT
- Fundamentals: Classification of mechanisms, constraints and degrees of freedom; kinematics of rigid body in respect of finite displacement of rigid body; matrix methods for describing displacements. Linkage mechanism design: synthesis of a plane four bar linkage for correlated crank displacements (Freudensteins method); coupler displacements specified; various straight line motions. Euler Savary equation; cognate mechanisms (Roberts Theorem); use of inflexion circle for simple planar mechanism design.
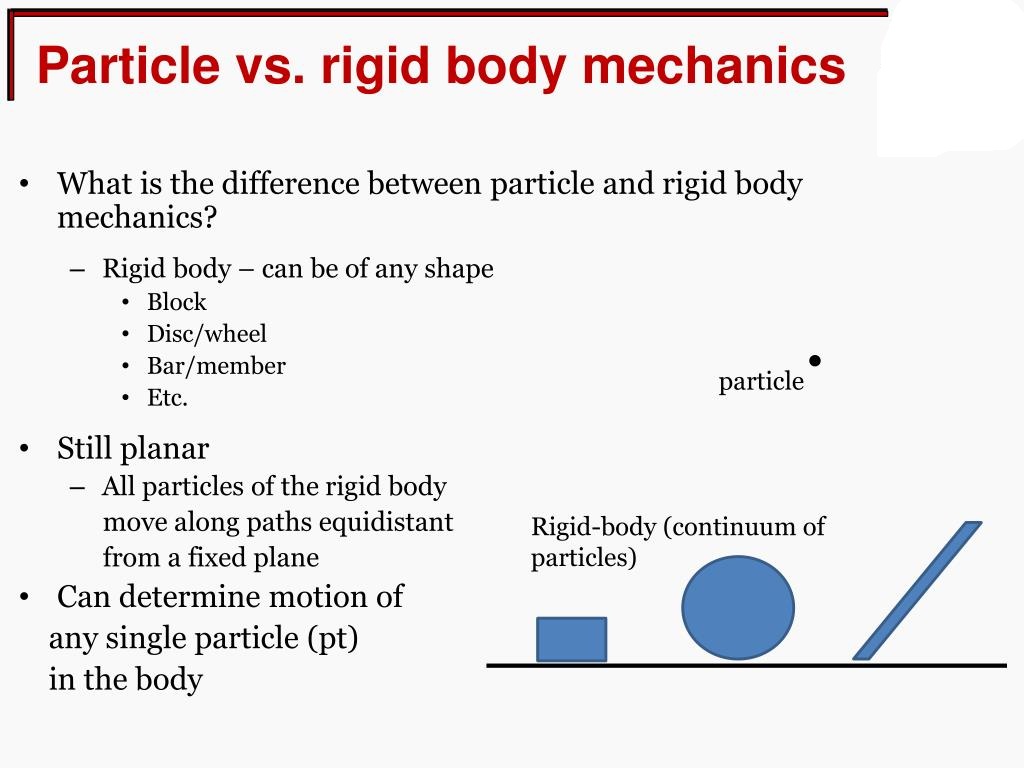
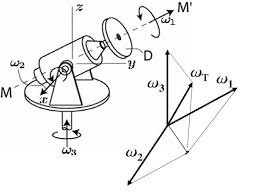
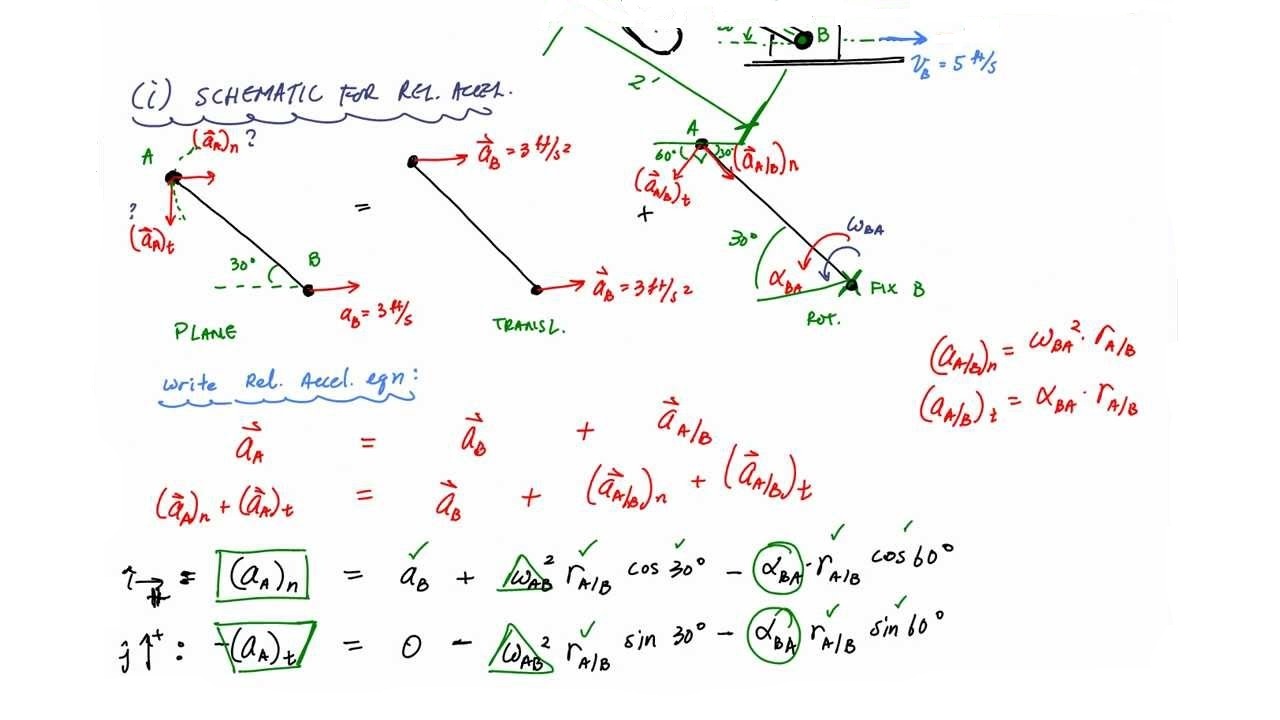
- Rigid Body Dynamics: Three-dimensional kinematics; angular momentum and the inertia matrix, Eulers and Largranges equations for the general motion of a rigid body, kinematics and dynamic analysis of linkage mechanisms. Application of the mechanical design of manipulators.
- Matrix Analysis Applied To Dynamics: Formulation of equations of motion in matrix format and generalized coordinates; properties of the mass and stiffness matrices coordinate transformations, principal coordinates; eigenvalues and elgenvectors (determination and properties). Matrix solutions to undamped and damped free and forced vibration problems, including modal superposition. Receptance and mechanical impedance matrices and their application to complex systems formed by the assembly of subsystems, substructure methods.
RECOMMENDED BOOKS
Coming Soon

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}